The Flexible Space Subdivision framework (FFS): a milestone in the SIMs3D project
Sep 15, 2017 (from: Abdoulaye Diakité)
A new article has been published in the scope of the SIMs3D Project:
Spatial subdivision of complex indoor environments for 3D indoor navigation. Abdoulaye A. Diakité and Sisi Zlatanova. International Journal of Geographical Information Science, 2017.
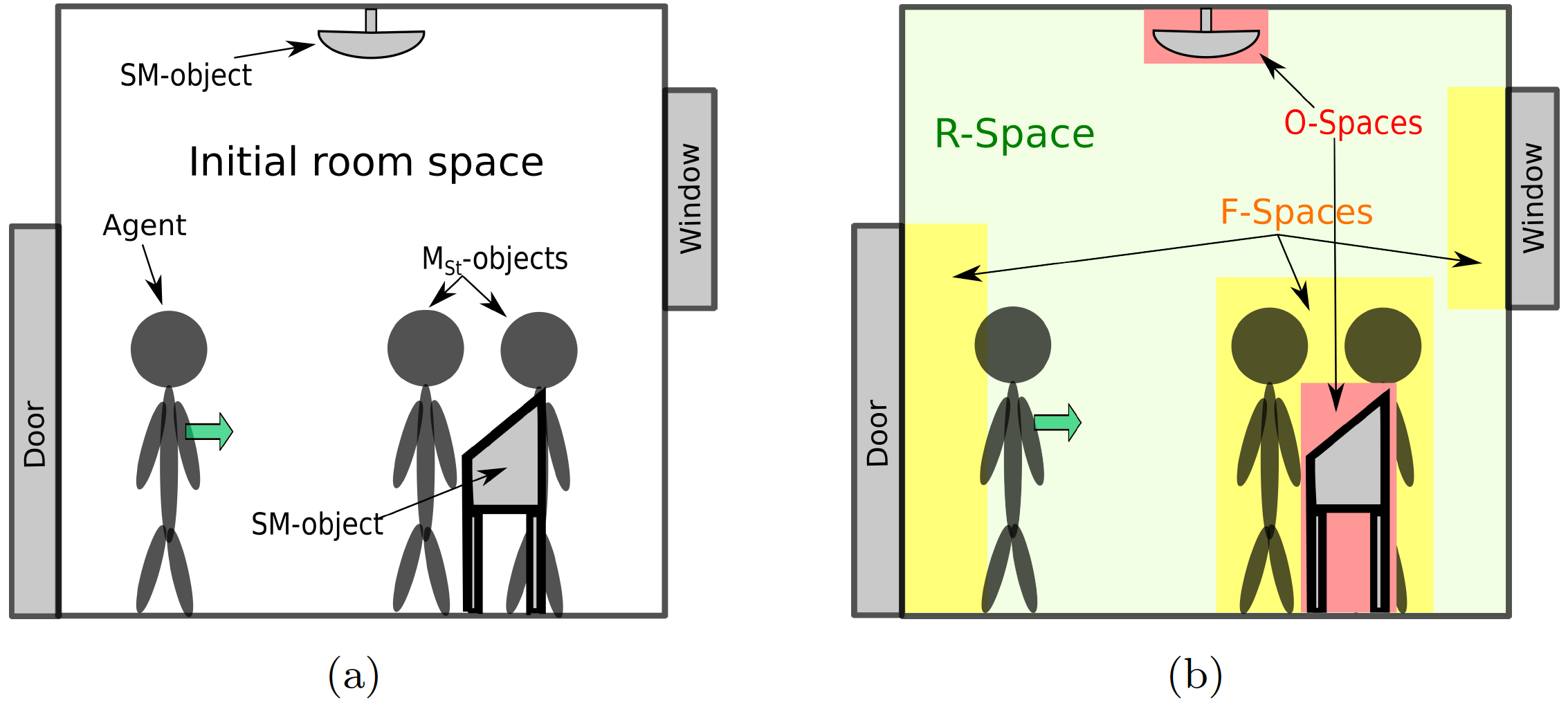
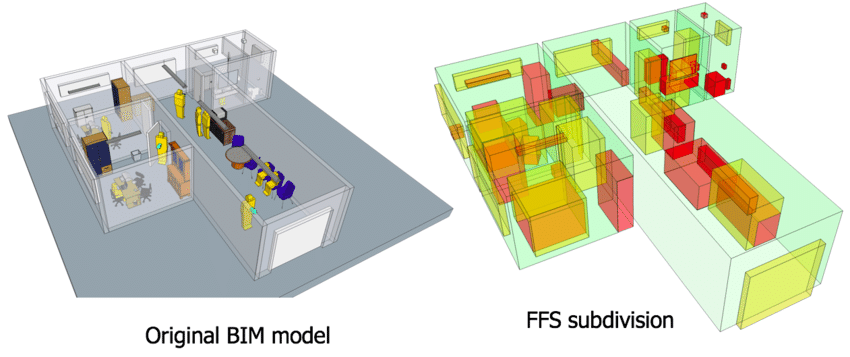
Abstract: As we realize that we spend most of our time in increasingly complex indoor environments, applications to assist indoor activities (e.g. guidance) have gained a lot of attention in the recent years. The advances in ubiquitous computing made possible the development of several spatial models intending to support context-aware and fine-grained indoor navigation systems. However, the available models often rely on simplified representations (e.g. 2D plans) and ignore the indoor features (e.g. furniture), thereby missing to reflect the complexity of the indoor environment. In this paper, we introduce the Flexible Space Subdivision framework (FSS) that allows to automatically identify the spaces that can be used for indoor navigation purpose. We propose a classification of indoor objects based on their ability to autonomously change location and we define a spatial subdivision of the indoor environment based on the classified objects and their functions. The framework can consider any 3D indoor configuration, the static and dynamic activities it hosts and it enables the possibility to consider all types of locomotion (e.g. walking, flying, etc.). It relies on input 3D models with geometric, semantic and topological information and identifies a set of subspaces with dedicated properties. We assess the framework against criteria defined in previous researches and we provide an example. With the FFS framework, the dauting task of fully considering the complexity of indoor environment appears to be more reachable. The spatial representation of the indoor navigable space proposed in this paper clearly makes it possible to go for a deeper exploration of the space for finer navigation purpose. The FSS framework provides an adapted subdivision of the 3D space, and considers the resources, the agents and all the parameters necessary to provide a proper navigation for any type of locomotion. The outcome of this paper stands clearly as a milestone in the NWO/M4S SIMs3D project (mainly the research line 2) that is aiming to provide support for advanced navigation in context of emergency in large buildings. The paper is available at the IJGIS journal's website (open access).
Abstract: As we realize that we spend most of our time in increasingly complex indoor environments, applications to assist indoor activities (e.g. guidance) have gained a lot of attention in the recent years. The advances in ubiquitous computing made possible the development of several spatial models intending to support context-aware and fine-grained indoor navigation systems. However, the available models often rely on simplified representations (e.g. 2D plans) and ignore the indoor features (e.g. furniture), thereby missing to reflect the complexity of the indoor environment. In this paper, we introduce the Flexible Space Subdivision framework (FSS) that allows to automatically identify the spaces that can be used for indoor navigation purpose. We propose a classification of indoor objects based on their ability to autonomously change location and we define a spatial subdivision of the indoor environment based on the classified objects and their functions. The framework can consider any 3D indoor configuration, the static and dynamic activities it hosts and it enables the possibility to consider all types of locomotion (e.g. walking, flying, etc.). It relies on input 3D models with geometric, semantic and topological information and identifies a set of subspaces with dedicated properties. We assess the framework against criteria defined in previous researches and we provide an example. With the FFS framework, the dauting task of fully considering the complexity of indoor environment appears to be more reachable. The spatial representation of the indoor navigable space proposed in this paper clearly makes it possible to go for a deeper exploration of the space for finer navigation purpose. The FSS framework provides an adapted subdivision of the 3D space, and considers the resources, the agents and all the parameters necessary to provide a proper navigation for any type of locomotion. The outcome of this paper stands clearly as a milestone in the NWO/M4S SIMs3D project (mainly the research line 2) that is aiming to provide support for advanced navigation in context of emergency in large buildings. The paper is available at the IJGIS journal's website (open access).