Registered point clouds of Maassilo and the Fire brigade, with the Leica scanner
Oct 30, 2015 (from: Abdoulaye Diakité)
The TU Delft team could perform the registration of the point clouds obtained from the Leica scanner during the scanning of the Maassilo building in Rotterdam and the Fire Brigade in Berkel en Rodenrijs.
As expected, the scans provided high quality point clouds, with a nice precision. The registration could be performed thanks to the targets provided with the scanner, that we placed all over the rooms
to allow the scanner to track its position.
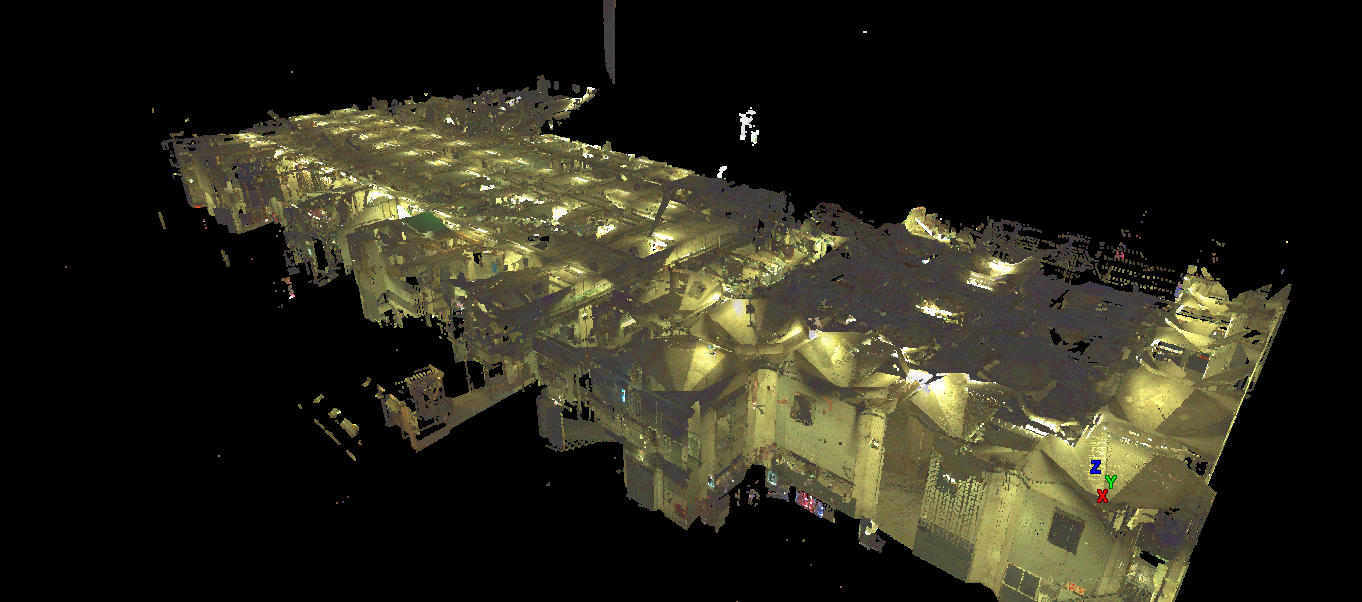
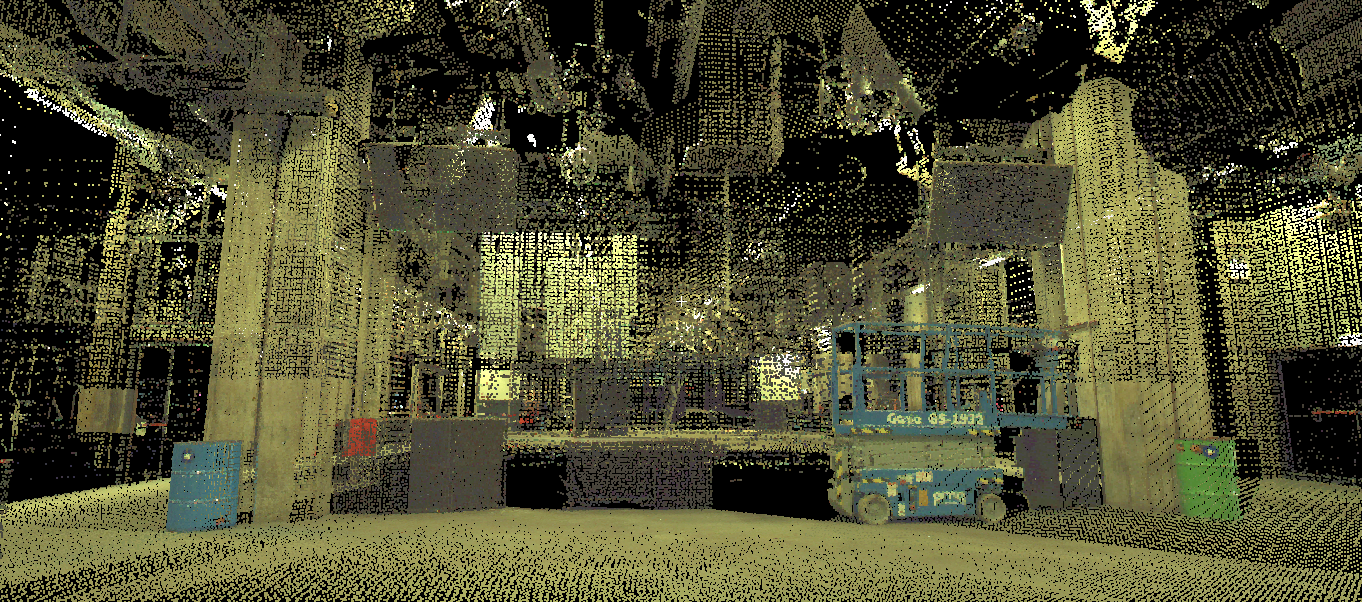
Thanks to the range of the Leica scanner, going up to 100m of distance, the building ground level of the Maassilo, with it's 6 meters high ceiling could be properly acquired. As illustrated by the images below, the Maassilo does not have many openings like windows or glass surfaces linked to the outdoor. Thus, the point clouds depict a compact description of the surrounding walls, for all the scanned rooms. The main limitations we could notice were related to the occlusions caused by the furnitures contained in the building. As the Leica is mainly shapped for outdoor scanning, and can offer only limited scanning position, we had to decide for the right place to put the scanner in each room, allowing to acquire the maximum number of points without occlusion.

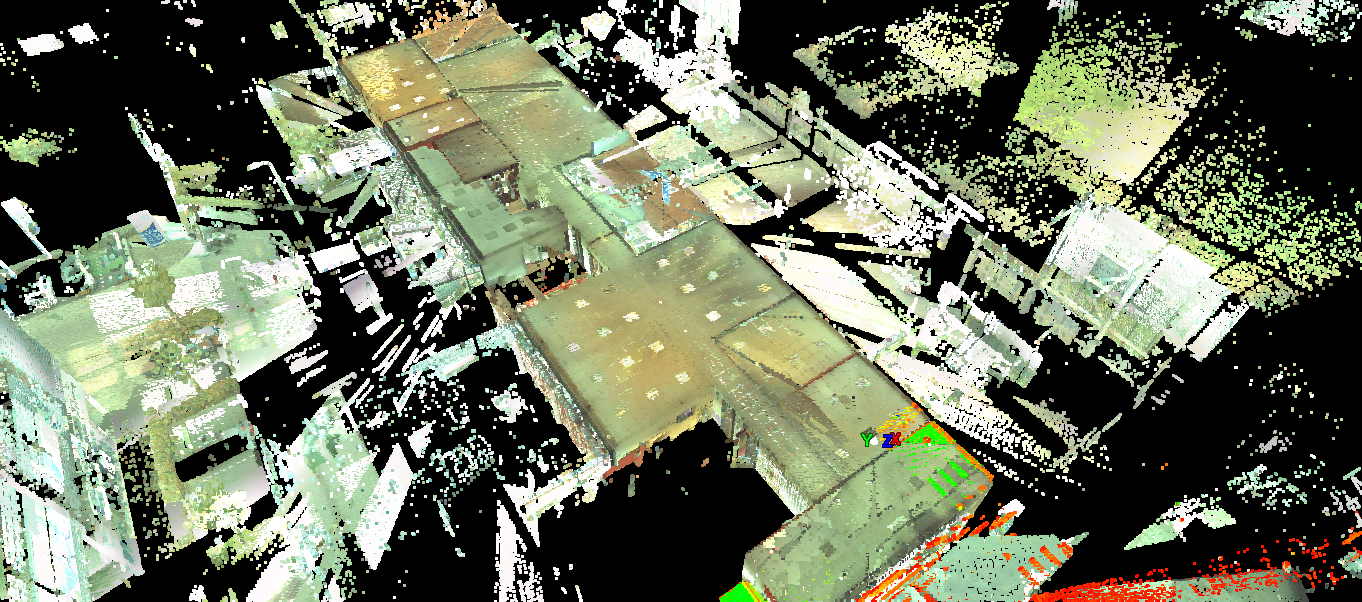
At the difference of the Maassilo building, the fire brigade is a wide glass surfaced building, offering an intense daylight exposition to every room. Due to that, the Leica, that is a laser scanner obviously acquire data from the outside of the room where the windows stand. Despite the noise created by such acquired points, high quality point clouds could be obtained for the indoor, leading to a precise descriptions of the rooms (see images below). The precsion of the data and the RGB information of the 3D points, provided thanks to the pictures acquired after each scan, make the Leica scanner a very interesting tool to study building indoor environment.



Now the Twente team is taking the hand to study and exploit deeper those point clouds. The goal is to get semantically rich BIM models out of the data, in an automatique way. The challenge is total!
Thanks to the range of the Leica scanner, going up to 100m of distance, the building ground level of the Maassilo, with it's 6 meters high ceiling could be properly acquired. As illustrated by the images below, the Maassilo does not have many openings like windows or glass surfaces linked to the outdoor. Thus, the point clouds depict a compact description of the surrounding walls, for all the scanned rooms. The main limitations we could notice were related to the occlusions caused by the furnitures contained in the building. As the Leica is mainly shapped for outdoor scanning, and can offer only limited scanning position, we had to decide for the right place to put the scanner in each room, allowing to acquire the maximum number of points without occlusion.
At the difference of the Maassilo building, the fire brigade is a wide glass surfaced building, offering an intense daylight exposition to every room. Due to that, the Leica, that is a laser scanner obviously acquire data from the outside of the room where the windows stand. Despite the noise created by such acquired points, high quality point clouds could be obtained for the indoor, leading to a precise descriptions of the rooms (see images below). The precsion of the data and the RGB information of the 3D points, provided thanks to the pictures acquired after each scan, make the Leica scanner a very interesting tool to study building indoor environment.
Now the Twente team is taking the hand to study and exploit deeper those point clouds. The goal is to get semantically rich BIM models out of the data, in an automatique way. The challenge is total!